Check the Getting Started page.
Turn onboard LED on and off
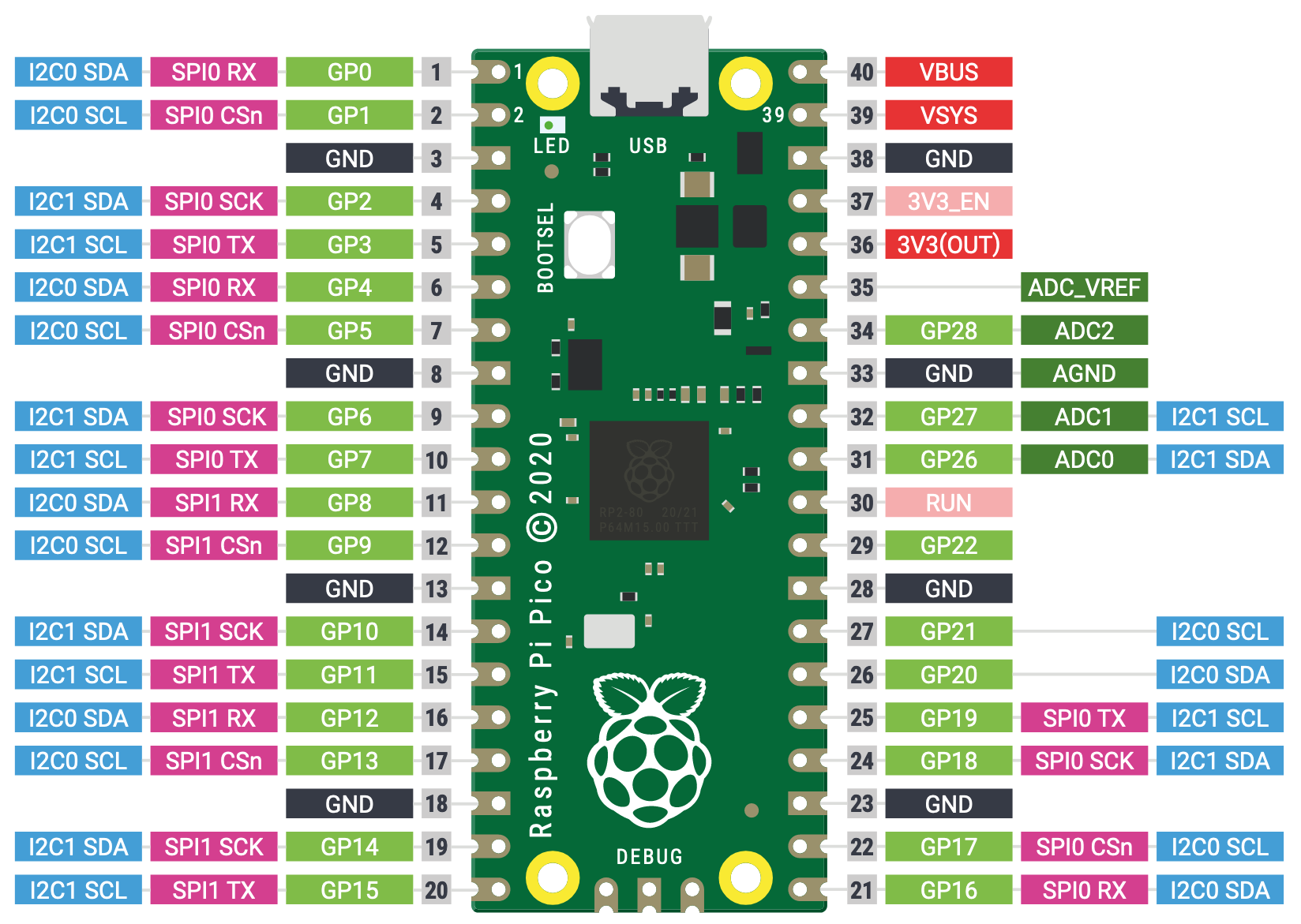
import machine
import utime
led_pin = machine.Pin(25, machine.Pin.OUT)
while True:
led_pin.value(1)
utime.sleep(3)
led_pin.value(0)
utime.sleep(3)Read temperature from sensor
from machine import ADC
import utime
sensor_temp = ADC(4)
conversion_factor = 3.3 / 65535
while True:
reading = sensor_temp.read_u16() * conversion_factor
# The temperature sensor measures the Vbe voltage of a biased bipolar diode, connected to the fifth ADC channel
# Typically, Vbe = 0.706V at 27 degrees C, with a slope of -1.721mV (0.001721) per degree.
temperature = 27 - (reading - 0.706)/0.001721
print(temperature)
utime.sleep(2)Read Temperature and switch on LED if threshold is reached
from machine import ADC
import utime
sensor_temp = ADC(4)
conversion_factor = 3.3 / 65535
led_pin = machine.Pin(25, machine.Pin.OUT)
while True:
reading = sensor_temp.read_u16() * conversion_factor
# The temperature sensor measures the Vbe voltage of a biased bipolar diode, connected to the fifth ADC channel
# Typically, Vbe = 0.706V at 27 degrees C, with a slope of -1.721mV (0.001721) per degree.
temperature = 27 - (reading - 0.706)/0.001721
print(temperature)
utime.sleep(2)
if temperature > 28:
led_pin.value(1)
utime.sleep(3)
else:
led_pin.value(0)
utime.sleep(3)External LED on breadboard
For this simple project, you will need a 1k resistor.
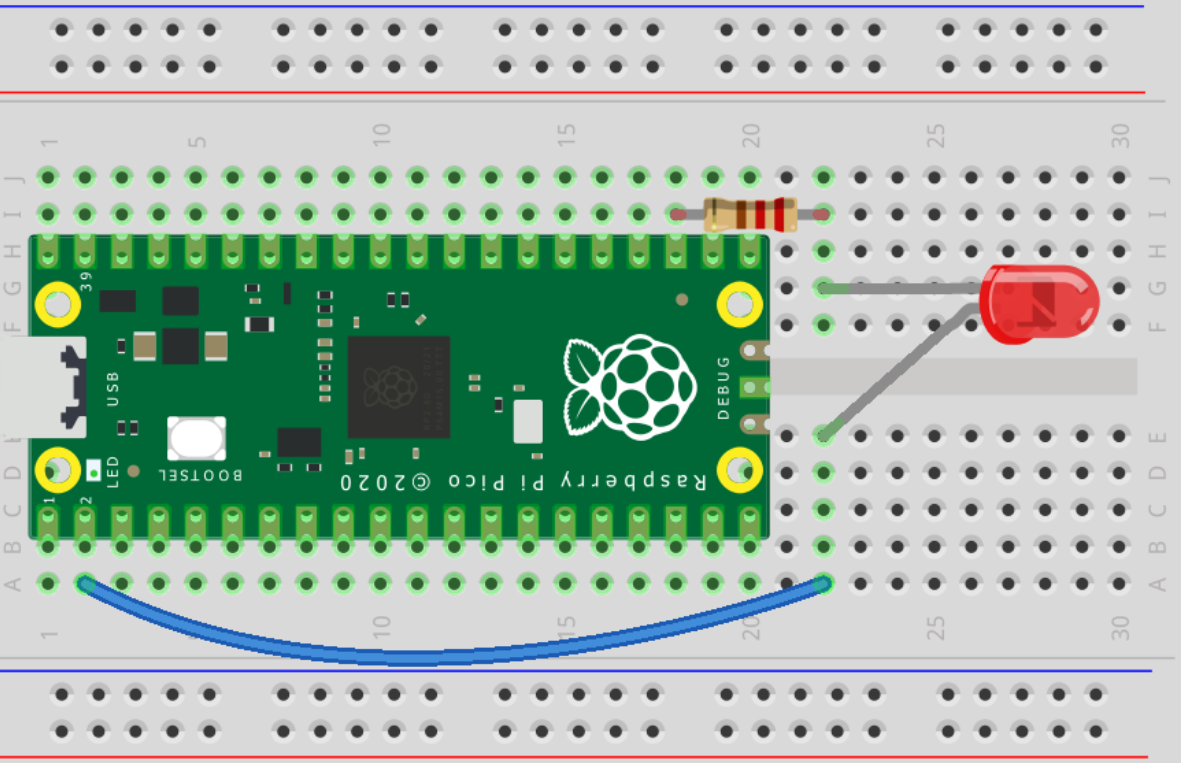
import machine #library for hardware; allows us to access pins
import time #for delays
redLed = machine.Pin(1, machine.Pin.OUT) #initialize GPIO 1 as output for red LED
while (1): #infinite loop; runs until manually stopped
redLed.toggle() #if LED is on, turn off. Else, turn on.
time.sleep(.5) #pause for 1/2 secondData log of onboard temperature sensor
This code logs data collected from the onboard temperature sensor, and the onboard led starts to blink as soon as the process has finished.
import machine
import utime
sensor_temp = machine.ADC(machine.ADC.CORE_TEMP)
conversion_factor = 3.3 / (65535)
file = open("temperature.txt", "w")
counter = 0
while counter < 10:
reading = sensor_temp.read_u16() * conversion_factor
temperature = 27 - (reading - 0.706)/0.001721
file.write( str(temperature) + "\n" )
file.flush()
utime.sleep(30)
print("Iteration no: ",counter)
counter += 1 # increment by one
print(" ")
print("Temperature log: ")
file = open("temperature.txt")
print(file.read())
file.close()
# Blink onboard led when data log is done
led_pin = machine.Pin(25, machine.Pin.OUT)
while True:
led_pin.value(1)
utime.sleep(1)
led_pin.value(0)
utime.sleep(1)Adding sound to your Pico
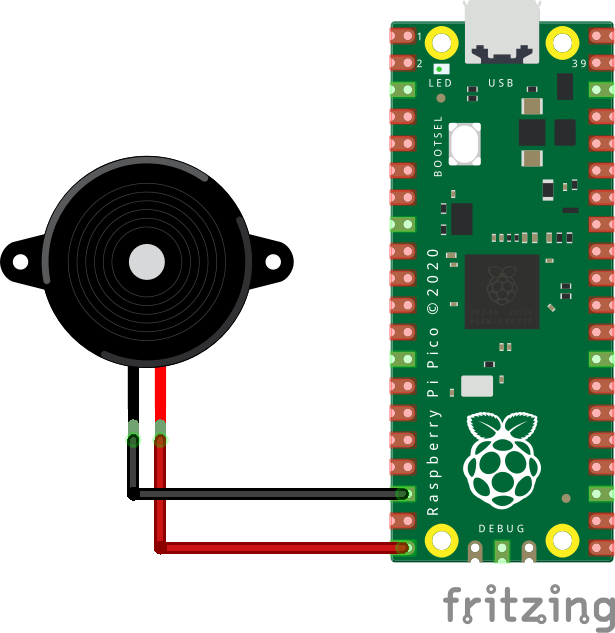
from machine import Pin, PWM from utime import sleep buzzer = PWM(Pin(15)) buzzer.freq(500) buzzer.duty_u16(1000) sleep(1) buzzer.duty_u16(0)
Playing a tune on your Pico
from machine import Pin, PWM
from utime import sleep
buzzer = PWM(Pin(15))
tones = {
"B0": 31,
"C1": 33,
"CS1": 35,
"D1": 37,
"DS1": 39,
"E1": 41,
"F1": 44,
"FS1": 46,
"G1": 49,
"GS1": 52,
"A1": 55,
"AS1": 58,
"B1": 62,
"C2": 65,
"CS2": 69,
"D2": 73,
"DS2": 78,
"E2": 82,
"F2": 87,
"FS2": 93,
"G2": 98,
"GS2": 104,
"A2": 110,
"AS2": 117,
"B2": 123,
"C3": 131,
"CS3": 139,
"D3": 147,
"DS3": 156,
"E3": 165,
"F3": 175,
"FS3": 185,
"G3": 196,
"GS3": 208,
"A3": 220,
"AS3": 233,
"B3": 247,
"C4": 262,
"CS4": 277,
"D4": 294,
"DS4": 311,
"E4": 330,
"F4": 349,
"FS4": 370,
"G4": 392,
"GS4": 415,
"A4": 440,
"AS4": 466,
"B4": 494,
"C5": 523,
"CS5": 554,
"D5": 587,
"DS5": 622,
"E5": 659,
"F5": 698,
"FS5": 740,
"G5": 784,
"GS5": 831,
"A5": 880,
"AS5": 932,
"B5": 988,
"C6": 1047,
"CS6": 1109,
"D6": 1175,
"DS6": 1245,
"E6": 1319,
"F6": 1397,
"FS6": 1480,
"G6": 1568,
"GS6": 1661,
"A6": 1760,
"AS6": 1865,
"B6": 1976,
"C7": 2093,
"CS7": 2217,
"D7": 2349,
"DS7": 2489,
"E7": 2637,
"F7": 2794,
"FS7": 2960,
"G7": 3136,
"GS7": 3322,
"A7": 3520,
"AS7": 3729,
"B7": 3951,
"C8": 4186,
"CS8": 4435,
"D8": 4699,
"DS8": 4978
}
song = ["E5","G5","A5","P","E5","G5","B5","A5","P","E5","G5","A5","P","G5","E5"]
def playtone(frequency):
buzzer.duty_u16(1000)
buzzer.freq(frequency)
def bequiet():
buzzer.duty_u16(0)
def playsong(mysong):
for i in range(len(mysong)):
if (mysong[i] == "P"):
bequiet()
else:
playtone(tones[mysong[i]])
sleep(0.3)
bequiet()
playsong(song)Operating a servo
The following code will operate a servo. Simply connect the the red wire to the VBUS pin and the black ground wire to any GND pin. The third signal wire should be connected to GP15 of the Raspberry Pi Pico.
from machine import Pin, PWM
import utime
MID = 1500000
MIN = 600000
MAX = 12000000
led = Pin(25,Pin.OUT)
pwm = PWM(Pin(15))
pwm.freq(50)
pwm.duty_ns(MID)
while True:
pwm.duty_ns(MIN)
utime.sleep(1)
pwm.duty_ns(MID)
utime.sleep(1)
pwm.duty_ns(MAX)
utime.sleep(1)Sources
-
https://www.theelectronics.co.in/2021/02/read-temperature-sensor-of-pico.html
-
https://community.microcenter.com/discussion/7038/using-the-raspberry-pi-pico
-
https://www.tomshardware.com/how-to/buzzer-music-raspberry-pi-pico
-
https://docs.micropython.org/en/latest/library/machine.PWM.html?highlight=pwm
-
https://www.youngwonks.com/blog/How-to-use-a-servo-motor-with-the-Raspberry-Pi-Pico